













研究室紹介
Human-Centered Robotics
Department of Mechanical Engineering, Faculty of Engineering
Department of Mechanical Engineering, Graduate School of Engineering
Department of Mechanical Engineering, School of Engineering
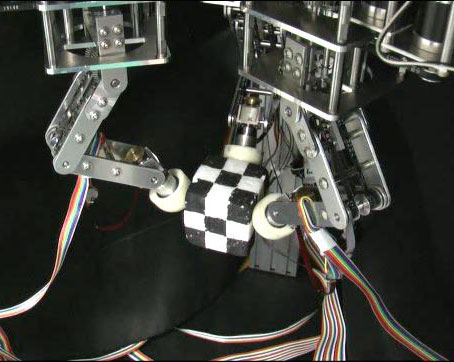
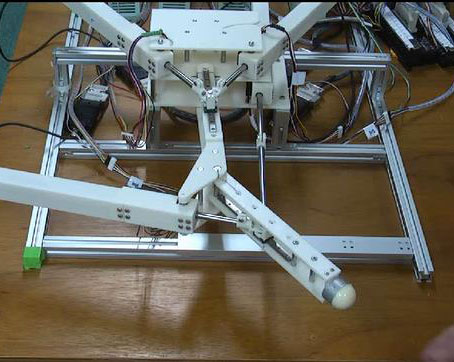
Our laboratory conducts research on the mathematical and mechanical understanding of the advanced motor intelligence possessed by living organisms such as humans, and its engineering applications, using robotics technology based on mechanical engineering. For example, the human hand is highly versatile, but robots capable of replicating its functions have yet to be realized. To achieve this goal, we are conducting research on the analysis and theoretical frameworks of how humans perform grasping and manipulation, as well as the mechanical structures involved. Additionally, human muscles can be both powerful and flexible, freely altering their properties to generate movement. To replicate such functions in robots, we are studying artificial muscle actuators and continuously variable transmission mechanisms.
Staff
Prof. Kenji Tahara
Assoc.Prof. Hikaru Arita
Assoc.Prof. Kazuto Nakashima
The Main Research Topics
- Multi-fingered Hand
- Soft Robotics
- Multiple Virtual Dynamics-based Control
- Proximity Sensing