










制御工学研究室
工学研究院 機械工学部門
工学府 機械工学専攻
工学部 機械工学科
本研究室では医療・福祉ロボットのように,ロボットが人の近くで動作する必要がある場合,人との相互作用が必要な場合,人に接触しながら動作する必要のある場合のロボットシステムを主に研究しています。このようなロボットでは,人との親和性が高く,安全な動作を保証するシステムと制御手法の開発が強く求められています。そこで,本研究室ではシステム制御理論やロボティクス,工学における各種の手法を用いながら,安全で役に立つロボットシステムの研究開発をおこなっています。

歩行を改善する歩行アシストスーツ
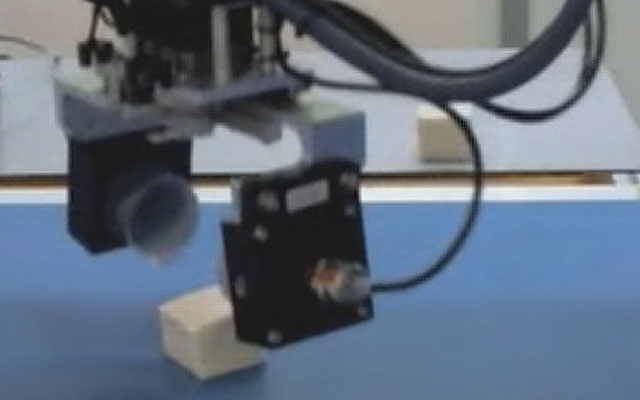
柔軟物を傷めない受動変形柔軟ハンド
所属教員
主な研究テーマ
- 人の負担を軽減するサービスロボット
- 医療・福祉ロボットシステム
- 柔らかなロボットと機械システムの実現