










ヒューマンセンタードロボティクス研究室
工学研究院 機械工学部門
工学府 機械工学専攻
工学部 機械工学科
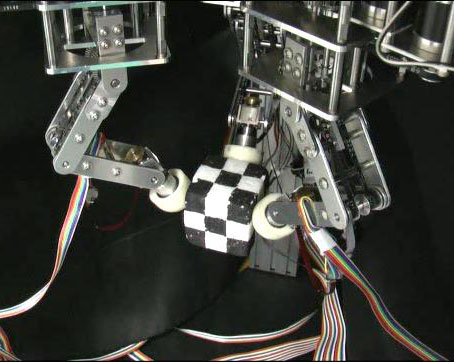
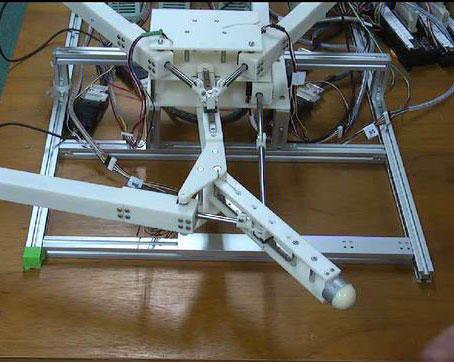
当研究室では、機械工学を基本としたロボティクス技術を用いて、人間等の生物が持つ高度な運動知能の数理的・力学的理解と、それらの工学的応用に関する研究を行っています。例えば、人間の手は非常に多才ですが、その機能を実現できるロボットは未だ具現化されていません。その実現を目指して、人がどのように把持・操作を行っているかについての解析や理論的枠組み、機械構造などについて研究を行っています。また、人の筋肉は時に力強く、時に柔らかくなり、自在にその特性を変化させながら運動を生成しています。そのような機能をロボットで実現するため、人工筋肉アクチュエータや無段変速機構の研究を行っています。
所属教員
主な研究テーマ
- 多指ハンド
- ソフトロボティクス
- 仮想ダイナミクスに基づく力制御
- 近接覚センサ